Mobyを生んだのは、“トイレの自立”を支援したいという想い
パラマウントベッドが自社開発した立位移動支援ロボットMoby(モビー)。
ベッドや椅子から立ち上がり、立ち上がった姿勢のまま行きたいところへ移動し、目的の場所(トイレなど)に座る。その一連の動作支援を目的として開発されたロボットです。カメラと画像処理技術による空間・障害物認識システムと合わせて、「自動運転」が可能なロボットです。
このMobyを開発したのが、今回お話を伺ったパラマウントベッドの初雁卓郎さんです。
2014年頃、当時技術開発本部に所属(現在は経営企画本部プロダクトマーケティンググループ)していた初雁さんが取り組んでいたのは、「介護を受ける人のトイレの自立」というテーマでした。自分の力でトイレに行きたい、でも転倒リスクやトイレに間に合わず失禁してしまうリスクもあるため、介助が必要になったりポータブルトイレやおむつの使用を余儀なくされてヒトの尊厳が損なわれる。少なくとも自分が要介護状態となった時、できるだけトイレは自立したい。
そういう人が、自分の意思でトイレに行くためのデバイスを作れないか。
これは、パラマウントベッドに入社する大きな動機であり、入社後変わらず取り組み続けているテーマです。この地道な取り組みが、自動運転技術の進化によって実現性が高まり、立位移動支援ロボットMobyの開発が始まりました。


立ち上がり、体重を預けて立位のまま移動し、トイレに腰掛ける。
Mobyがベッドやトイレのすぐそばまで接近していることに注目。
重心や足回り・手すりの形状・胸をあずけるソフトパッド・
駆動輪の位置等が計算されており、一連の動作でも安定している
(初雁さん)「“トイレの自立”を支援するにはどういう方法があるのか。それこそ最初はいろいろ考えてトライしました。ベッドから離れるにはどうすればいいのか。理想は自分で立ち上がりたい。ではそのためにはどういう支援があるのか。立ち上がったとして、そのまま自分で歩くのか? それが心もとないからトイレに一人で行けないのでは? だったらベッドから車いすに乗り換える支援。車いすからトイレに座り直す支援。どのタイミングでズボンを下ろすのか。ズボンをいつ上げるのか。トイレが終わったらまた立ち上がる……。最初はいろんな可能性やシーンを想定していました」
トイレの自立というお話ですが、その文脈で「ベッドから立ち上がる」、という場合、完全に機械が立ち上がらせるのではなく、「本人がご自身で立ち上がる」ことを補助する、そういうことでしょうか?
(初雁さん)「そうですね。この研究は“ご自身が自分の意思でトイレに行く”支援なので、まずは第一段階として、ご自身の力でベッドから離れる方法を考えました」
そこから、ベッドに腰掛けてそこから自分の力で立ち上がる、という動作の支援に至ったのですね。とすると手すりのようなモノが伸びてきて、それにつかまって……
(初雁さん)「人が立ち上がる時にどういう力や重心移動でそれを行うのか。ではその時倒れないようにつかまる手すりはどういう形でどういう向きなのか。その手すりはどうやって安定させて、立ち上がる人の体重や力を受け止めるのか。そういうことをトライしているうちに、『自分が足を乗っけて、その重さで安定させながら手すりにつかまって立ち上がり、寄りかかって抱え込むように上半身を預ける』この形が出来てきました」
(上の連続写真参照。ベッドに腰掛けた状態からMobyに体重を預け、そのまま寄り掛かって立ち上がる様子がわかる)
記者も試してみましたが、ベッドに腰掛けた状態から、Mobyの低い位置にある膝当てパッドのような部分にスネを預けて、手すりを持ちながら立ち上がってみると、想像よりはるかに楽に立ち上がることができました。そのまま誰かの背中におんぶされるような格好でMoby本体にもたれかかります。
(初雁さん)「こうやって立ち上がってみると、あれ? 車いすに座り直す必要はないんじゃないか、このまま立った姿勢(寄りかかっているので実際に立つよりは楽で安定している)でトイレまで移動できれば、トイレではここから便座に腰を落とすだけでいい、ということに気づきました」
なるほど!
(初雁さん)「じゃあ楽に操作できて立ったまま移動する機械を作ろう、というのが次の発想です。それを実現できればトイレまで行ける。トイレに着いたら、立ち上がるときの応用で“座る動作”はサポートできます」
立位移動(立った姿勢のまま移動すること)ですね
(初雁さん)「ではどうやって不安定な立位支援ロボットを安定させようか、移動にはどういう動力や方式を使おうか、向きはどう変えようか、と考えていきました。小型で強力なモーターや制御機構は、過去にベッド搬送のパワーアシストシステムを一緒に開発した会社の、当時の開発担当者の協力があり実現しました」
この台座にモーターや制御機構が収まっているのはすごいですね。これが低重心を実現しているんですね
(初雁さん)「そうですね。このフレーム(下写真の黒いカバーの中)に動力や、向きを変えたりする機構も全て納めています。重心だけでなく、全体のサイズもコンパクトじゃないと施設や家庭内で使えないので、そこも苦労しました」

モーターや制御機構は黒いフレームの中に収まっている。その結果足を乗せるプレートは床とほぼ同じ高さを実現。
同時に、人を乗せたまま、ぎりぎりまでベッドやトイレに近づけるようにMobyはデザインされている

特徴的な足元の形状や重心の考え方、手すりなどの基本形状は初号機の段階から一貫している
(初雁さん)「次に、搭乗者はどうやって“行きたい方向に、行きたい速度で”向かうのか。障害物はどうやって避けようか。こうしてあれこれセンサーや制御装置も組み込んだ機械が出来上がってきました」
ロボットですね!
(初雁さん)「そうですね。平田教授に倣えば、れっきとしたロボットですね。ロボットを開発しよう、という目的ではなく、トイレの自立を考えていろいろ試作してできた機体がロボットだった、という感じです。
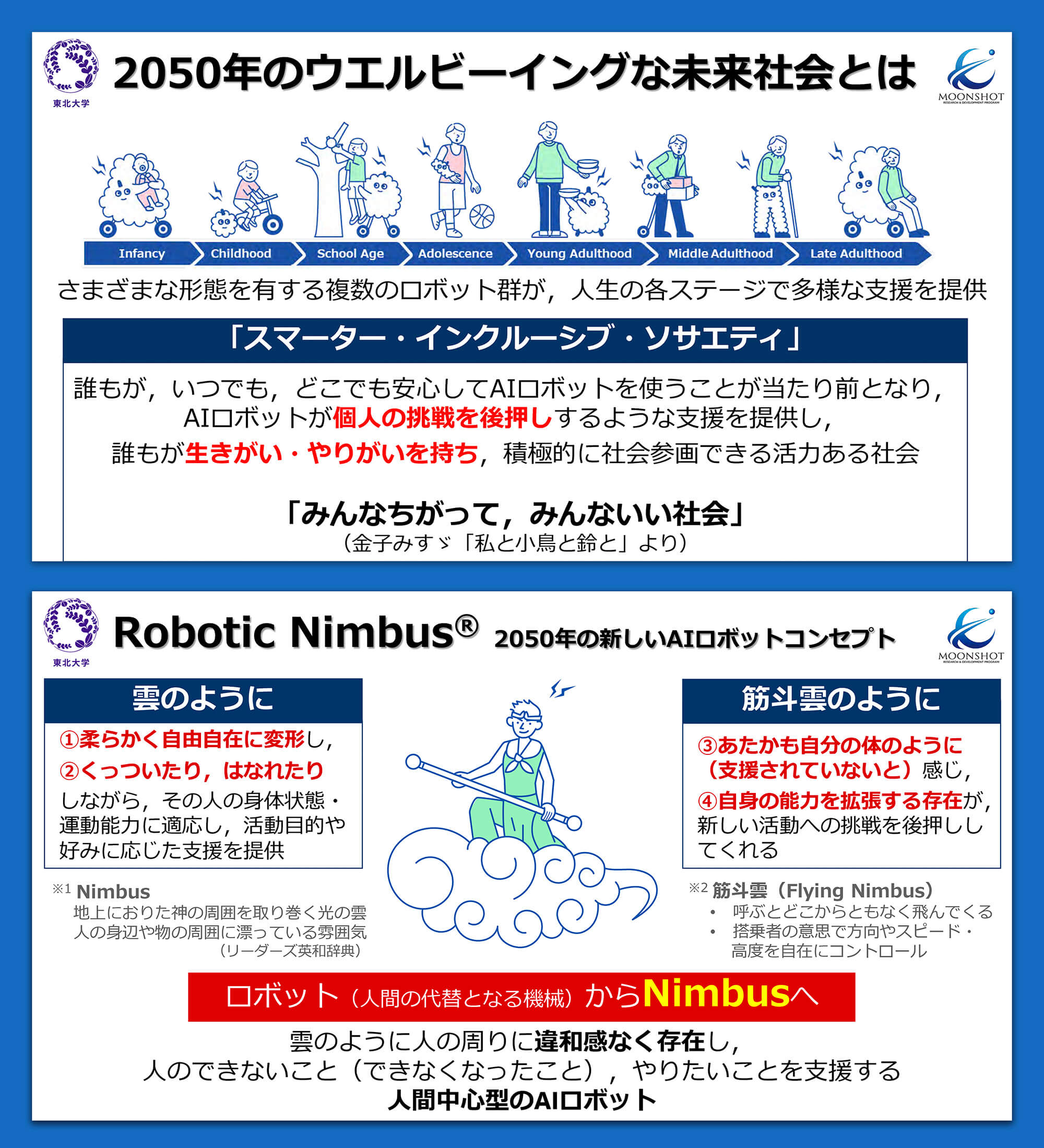
我々が将来的にイメージするRobotic Nimbus※にはまだ少し遠いですが、こうして様々な実証機で知見を積み重ねていって、将来的にはもっと柔らかで『支援されていることを意識しない』ものにまで進めていく、そのある部分を担っている研究なんです」
※Robotic Nimbus:ロボティックニンバス。東北大学工学研究科ロボティクス専攻の平田泰久教授が提唱している「柔らかくて、支援されていることを意識させない」AIロボット群の総称。ニンバスはラテン語で“雲”を意味する言葉からの命名。後述
ベッド→移動→トイレ、という一連の動作に話を戻しますと、この流線型の手すりの形状が、使う人の動作を自然に導いているような気がします。どうつかまって、どう体重をかけるのか、先ほど体験させていただきましたが、あまり考えなくてもできますね
(初雁さん)「ベッドや便座から立ち上がるとき、体を預けて移動しているとき、ベッドや便座に座るとき、それぞれ自然に持てるように形状や角度を工夫しています」
それぞれがバラバラの手すりやグリップじゃなくて連続しているのもいいですね。強度的な理由でこうしたのかもしれないですが
(初雁さん)「もちろん強度は重要なので、十分に確保しています。なにしろ体を預けるわけですから。その延長の話をしますと、この本体支柱(手すりなどを支える中央の太い支柱)は利用者の体格に合わせて上下に高さを調整できる設計なのですが、実はパラマウントベッドのとある別の製品の部品を使っています。この強度と軽さで高さ調整可能な支柱をイチから設計するのは、コストも含め相当大変なので」
なぜ「立った姿勢」での移動を支援するのか
あらためてMobyを見ると、やはり「立ったままの姿勢で移動する」という点がとてもユニークです。
なぜ立った姿勢で移動するのか。もう少し詳しく伺ってみました。
(初雁さん)「この機体は、介護などの現場において、ご本人がベッドからトイレへ自分で行くことを支援するのが目的です。もし移動手段として車いすを使うとなると、(1)ベッドから車いすへ、(2)車いすからトイレの便座へ、(3)トイレが終わったら便座から車いすへ、(4)そしてまた車いすからベッドへ。合計4回乗り換えが生じます。乗り換えでは“立って座って”という動作がワンセットになるので、そうすると合計4回立ち上がって、4回座ることになります」
確かに。相当なアクションが必要になりますね
(初雁さん)「介助という面でも、ご本人の負担という面でも、その回数はなるべく減らしたい。『じゃあ立ったまま移動できれば……』という発想になったのは先ほどお話しました。純粋に行動(トイレへ行って帰る、など)にかかる時間が短くなる、というデータも出ています」
なるほど
(初雁さん)「そして、立った姿勢で移動するもう一つ重要な意図があります。それは、身体的、そして心理的な効果です。立った姿勢では足の裏からの身体刺激が入り、また補助しているとはいえ体重を支えることで足の筋肉が収縮して血流が促進され、リハビリとまではいかないけれど、日常生活の中で体の状態を維持するという面では非常に効果的であると思います。これが身体的なこと」
なるほど。寝たり座ったり、という日常に「立つ」時間を加えられるんですね
(初雁さん)「そうですね。そういう肉体的な側面と、あとは目線です。目線というか視点ですね。足元がよく見え、何より立って歩く時と同じ目線で移動できるのはご本人のモチベーションにも大きく寄与すると思います」
モチベーション、つまり心理的な効果ですね。興味深いです
(初雁さん)「ご本人が、その行動を自ら自然に行う、モチベーションはとても大事なことだと思います」
ここでインタビューに同席していた、平田泰久教授が補足します。
(平田教授)「立って移動すると、見える風景は座っている時とはだいぶ違います。また、立った人と目線が合います。いま我々がこうして話しているように、同じ目線でコミュニケーションが取れるというのは本来とても自然なことなので、『日常生活』という意味では案外重要な要素だと考えています。色々な意味で、我々がイメージする日常からなるべく違和感なく行動や挑戦ができる、そこを常に考えています」
初雁さん、平田教授、お二方と話していると「日常」「違和感なく自然に」「モチベーション」というワードが何度も出てきて、とても印象に残りました。
そこには研究者が描くAIロボットの将来像が大きく関係していました。

あたかも自分の体のように(支援されていないと)感じ、自身の能力を拡張する存在
平田教授は将来の「人に寄り添うAIロボット群」コンセプトとして「Robotic Nimbus(ロボティック ニンバス)」という名称を提唱しています。略してNimbus(ニンバス)と呼ぶこともあります。
ロボット本体や、センシング、それらを制御するシステムの総称で、「Nimbus robots」「Nimbus Sensing」「Nimbus Computing」のようにそれぞれ呼称します。
これらは、内閣府のムーンショットプロジェクト※の一環として行われている研究開発です。
※ムーンショット型研究開発制度:内閣府が策定する研究開発推進の枠組み。米国の「アポロ計画」─1960年代に「10年以内に人類を月に着陸させて帰還させる」という極めて挑戦的な目標を掲げたプロジェクト─に由来し、困難だが実現できたときの成果が大きいプロジェクトの創出と支援を目的とする。今回取材した介護ロボット研究は、ムーンショット目標3「2050年までに、AIとロボットの共進化により、自ら学習・行動し人と共生するロボットを実現」プログラムのひとつ
平田教授は、Nimbus(ニンバス)という名前について、このように話します。
「『Nimbus』というのはラテン語の『雲』という単語で、地上に降りた聖人の周りに漂っている光の輪とか後光を指す言葉です。『Cloud(クラウド)』も雲ですが、NimbusはCloudのようにどこか遠くの天上にあるのではなく、人やモノの周囲にふわふわ漂う雰囲気のようなイメージです。あとは、孫悟空の筋斗雲(きんとうん)のことをFlying Nimbusと訳すのですが、まさに筋斗雲のように呼べばどこからともなくやってくる、そして搭乗者の意思で方向やスピードを自在にコントロールできる、そういうイメージがぴったりだなと思いました」
ロボットと共生する未来社会に向けて」(平田泰久, 2025)より引用。
未来のウェルビーイングな社会と、人に寄り添うロボット=Nimbusのコンセプトが描かれている
介護ロボットの効果検証・評価を行う“日常空間”、「青葉山リビングラボ」
お二人と話していると何度も出てくるワード、「日常」「違和感なく自然に」「モチベーション」。
これらと密接に関係する施設が東北大学「青葉山リビングラボ」です。
訪問した日、パラマウントベッドの初雁さんは、自身が開発したMobyに乗ってベッドからトイレへの移動検証デモを行っていました。
大学の研究室内になぜベッドやトイレが?
実はこの日常を再現した空間が、研究室に隣接する「青葉山リビングラボ」です。
AIロボットの評価・効果検証を実施するために全国8拠点に設けられた開発促進機関<リビングラボ>のひとつで、厚生労働省が実施する「介護ロボットの開発・実証・普及のプラットフォーム構築事業」の一環で設けられた施設です。
デスクやモニター、工作機械などが並ぶ広くて整然としたロボティクスの研究室。そこからドアもなく連続する隣の空間に、さまざまな生活空間を再現した「日常」スペースが広がる光景は新鮮でした。
椅子や棚、ベッドなどの家具に加え、食器や花瓶などの日用品を配置したフローリングの部屋。少し離れた場所には、壁に囲まれた狭い空間に便器が設置されたトイレの個室ブース。また別の一角にはスーパーマーケットの商品棚が再現されています。本当の日常空間と違うのは、たくさんのロボットやパーツ、センサーなどが点在している、という点でした。


ラボには、試作中の機体も含め多彩なロボットやパーツが点在している

さまざまな日常のシチュエーションで検証実験が行われていることがうかがえる
誰もが生きがい・やりがいを持ち、積極的に社会参画できる
研究室とリビングラボでは日々、多種多様な介護ロボットや身体補助器具の研究・開発と実証実験が行われています。
研究者たちが目指すのは「日常の延長として違和感なく存在する」AIロボット=Nimbusでした。
前出のムーンショットプロジェクトの資料には、目指すべき社会の姿がこう書かれています。
「誰もが、いつでも、どこでも安心してAIロボットを使うことが当たり前となり、AIロボットが個人の挑戦を後押しするような支援を提供し、誰もが生きがい・やりがいを持ち、積極的に社会参画できる活力ある社会」
〜 Moonshot AI and Robotics -Toward a Future Society Coexisting with AI Robots- ロボットと共生する未来社会に向けて 〜より
Mobyがなぜ「立った姿勢」での移動を支援するのか。
インタビューで初雁さんと平田教授が話す、「自立」「日常」「違和感なく自然に」「モチベーション」というワードが、まさにこうしたAIロボットの将来像と、そこを目指す研究者の想いを表していると感じました。
ここで補足しておきたいことは、初雁さんも平田教授も車いすを否定しているわけではなく、その利点や存在意義は当然理解した上で、AIロボットの将来像を追求する研究の一つとして立位移動ロボットを開発されているという点です(その証拠に、研究室とリビングラボには、車いす型のロボットもたくさんありました)。
インタビューの最後に、Moby開発のエピソードとして初雁さんはこんな話をしていました。
「開発初期のころ、Mobyを自宅に持って帰って試していた時期があるんです、車いすも一緒に持ち込んで。自分の生活環境ではどうなるんだろうと、日常でやっていたことを車いすやMobyでいろいろトライしました。その中でたくさん発見があったのですが、キッチンでこんなことがありました。冷蔵庫の物を取るとき、車いすだと上の方や奥の物は取れなかったんです。それがMobyだと普段通りに取れるんです。『あ、こういうところにも違いが出てくるんだ』と驚きました。我々の身の回りって、立って移動することを前提に作られているモノがこんなに多いんだと思いました」
機能やメカニズムの話も興味深かったのですが、この冷蔵庫のエピソードや、先ほどの「目線」の話が、今回の取材でとても印象的でした。取材を通して、人が自分らしくいられるために介護ロボットが(こっそり自然に)活躍する、そんな未来のイメージが少し現実味を帯びました。
立位移動支援ロボットMoby、そしてNimbusと名付けられたAIロボット群。
「柔らかくて、時にくっついたり離れたりしながら、あたかも自分の体のように自身の能力を拡張する」介護AIロボットが、私たちの生活にやってくる日はそう遠くないのかもしれません。
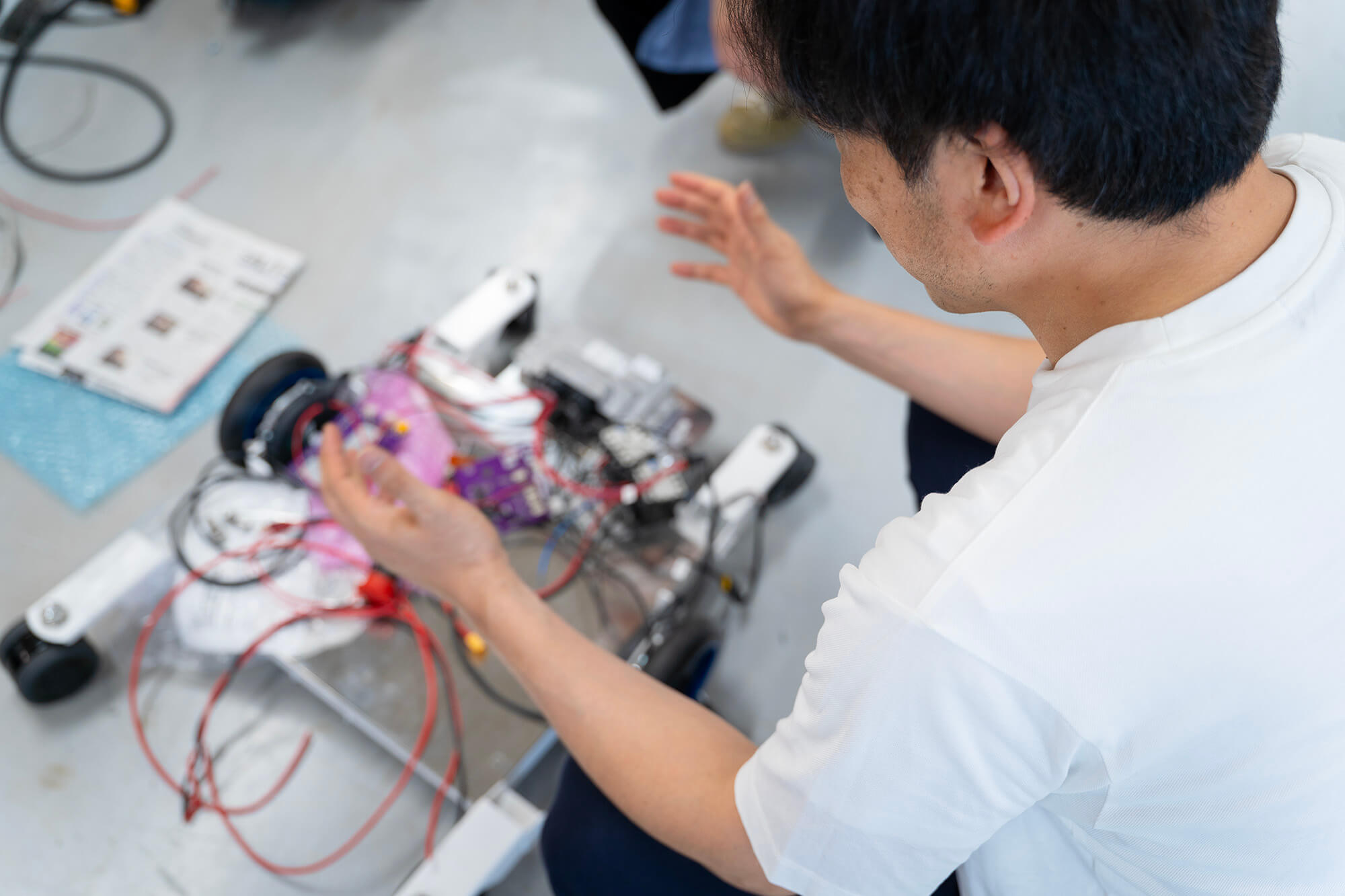
操作性・障害物検知システム・強力で小型のモーターなど、開発の苦心について説明する初雁さん